




 國家圖書館 |
 校園授權軟體 |
 IEEE Xplore |
 ScienceDirect |
 Google學術搜尋 |
 Scopus文獻搜尋 |
| Menu |
QR Code (CIR Lab Website)
![]()
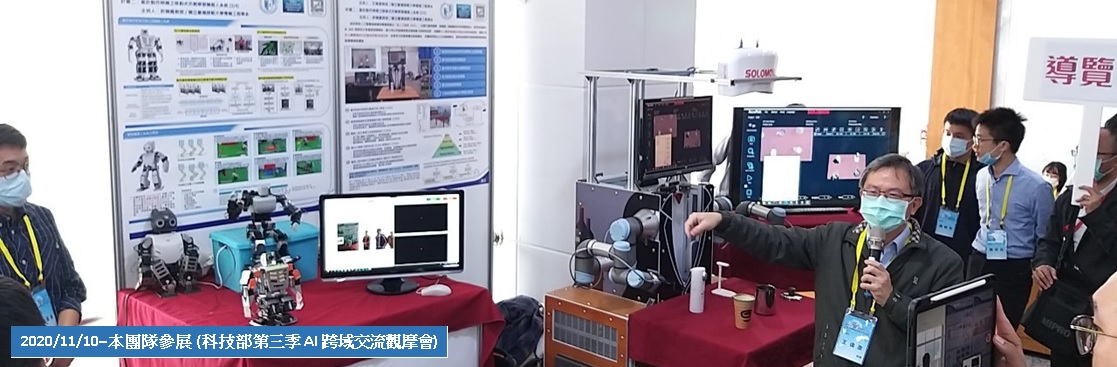
Prof. Chen-Chien Hsu - TEEP project descriptions
![]()
There are 3 projects that TEEP students can participate in, including:
Project 1: Multi-Objective Crowd-Aware Robot Navigation System Using Deep Reinforcement Learning,
Project 2: Collaborative Robots with Active Safety Protection Mechanism, and
Project 3: Deep Learning-Based Intelligent Video Surveillance System.
Each project is briefly described as follows:
Project 1: Multi-Objective Crowd-Aware Robot Navigation System Using Deep Reinforcement Learning |
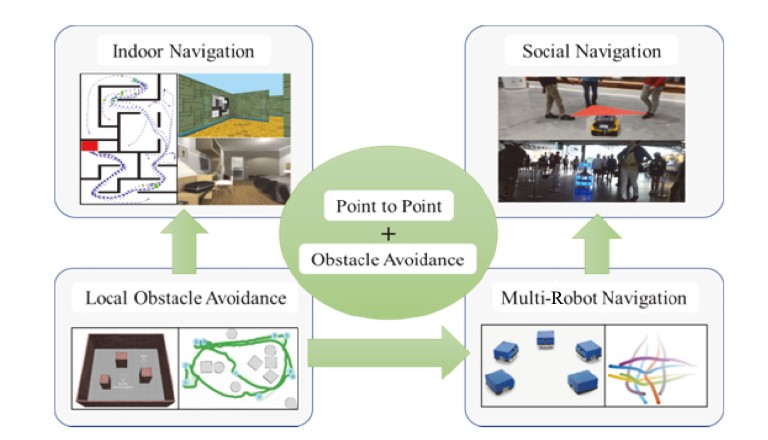
For robots to successfully navigate in a realistic crowded environment, the robots must have pedestrian awareness (human-aware). With the advance of deep learning, there have also been researches on navigation systems based on reinforcement learning, addressing the limitations of robot navigation in complex crowded environments. However, these approaches failed to simultaneously consider the multiple objectives, including safety, time efficiency, discomfort distance, and path smoothness of the navigation tasks in crowds. Also, the action and emotional responses of pedestrians in the face of danger are not considered either. Thus, this project aims to investigate various aspects to develop a multi-objective crowd-aware robot navigation system using deep reinforcement learning. Keywords: deep reinforcement learning, autonomous navigation, obstacle avoidance, human-aware motion planning, crowd-aware robot navigation, mobile robots, multi-objective, human-robot interaction, multi-objective deep reinforcement learning.
Fig. 1. Crowd-aware robot navigation system [1]. [1] K. Zhu and T. Zhang, "Deep reinforcement learning based mobile robot navigation: A review," in Tsinghua Science and Technology, vol. 26, no. 5, pp. 674-691, Oct. 2021. |
Project 2: Collaborative Robots with Active Safety Protection Mechanism |
||||
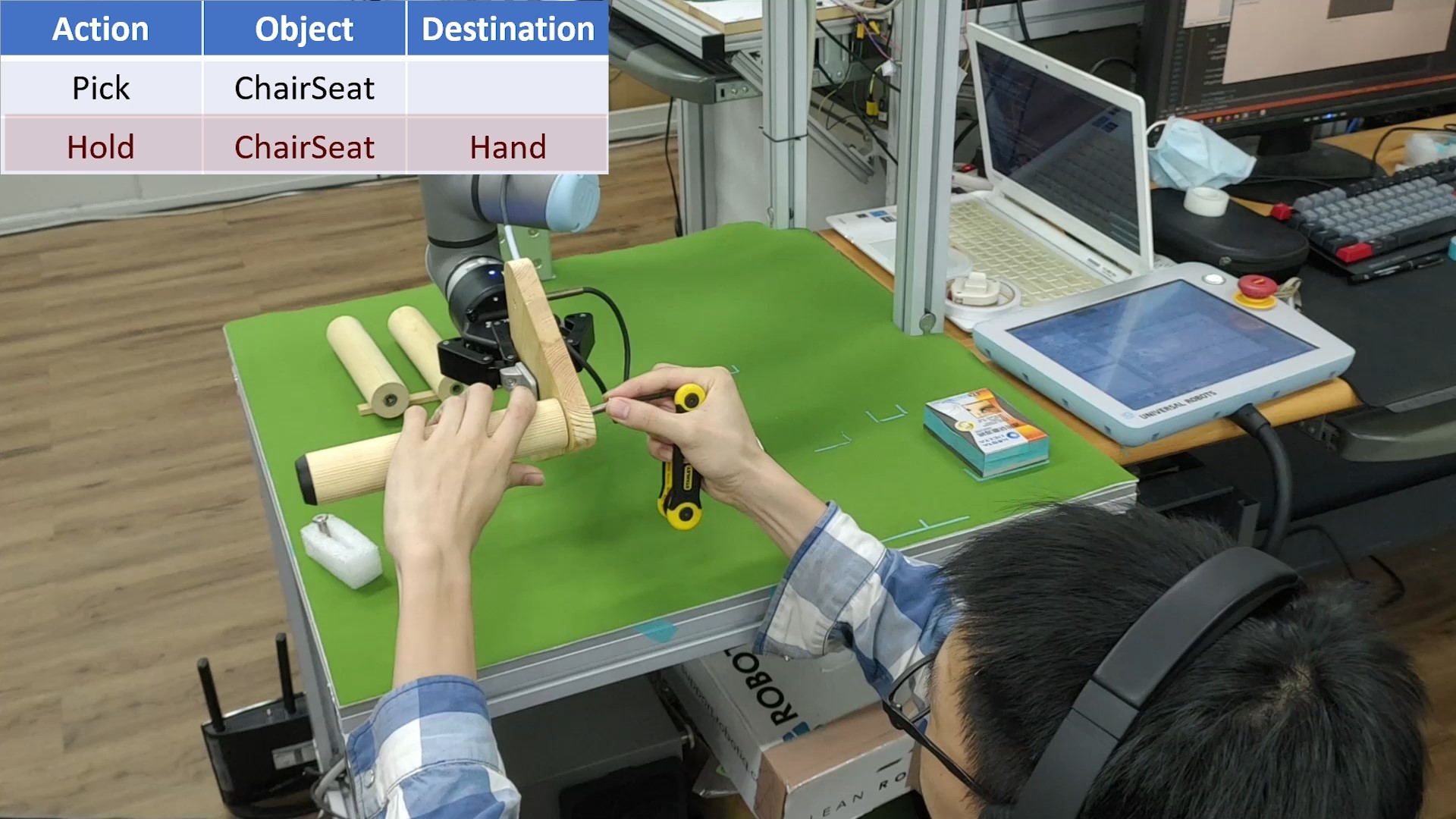
There are more and more demands for collaborative robots (Cobots) that emphasize the use of the respective advantages of robots and humans to allow them to work side by side, in which humans are good at handling flexible, tactile, and agile tasks as well as coping with various emergencies, while robots are reliable for fast, accurate, and highly repetitive tasks. To achieve a higher level of human-robot collaboration, the key capabilities that need to be considered in the collaborative robot system include: (1) the ability of the robot to understand human commands, (2) the interoperability of the robot with the environment, and (3) the safety protection capability of the robot. Therefore, this project aims to investigate the key capabilities that collaborative robots should possess and propose improvement methods as a result. Keywords: collaborative robots, human-robot interaction, natural language processing, gesture recognition, object pose estimation, robotic grasping, path planning, collaborative robot safety.
|
Project 3: Deep Learning-Based Intelligent Video Surveillance System |
||||
To achieve the objectives of automated surveillance systems, various video contents analysis (VCA) solutions need to be considered. It is therefore the objectives of this project to investigate human behaviors and image interpretation to establish an intelligent surveillance system based on deep learning. Topics under future investigation include human action recognition, action-related object detection, identity recognition, based on which unusual behavior or unusual process detection can be achieved for a surveillance environment. Keywords: intelligent surveillance, unusual behavior detection, unusual process detection, action recognition, object detection, self-supervised learning, spatio-temporal action recognition, identity recognition, cloud computing.
|

Login |
|||||
|

Research Achievement (HOT) |
|
NTNU Calendar |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||