
| 科技部AI創新研究中心專案計畫 由人類動作演示引導機器人學習之方法與系統的研究─演示學習型機器人研發(3/4) MOST 109-2634-F-003-006 |
 |
 |
 |
亮點一:強人工智慧(AGI)之技術開發-機器人之認知系統建置
![]()
重點項目 |
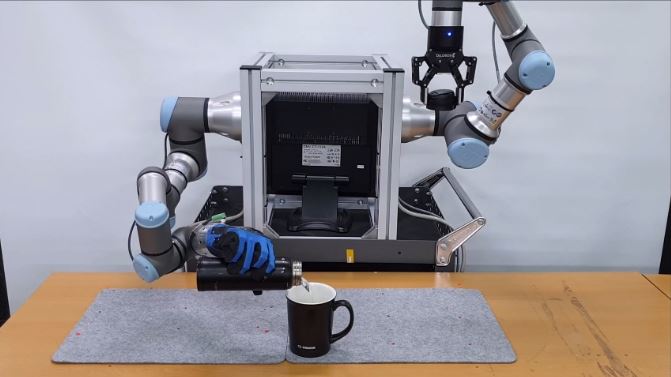
項目一:應用增強式學習於機械手臂之學習 (已完成) 由於機器人是經由獎懲來進行學習,因此我們針對任務的狀況以設計相對應的獎懲方法,讓機器人能夠透過自我嘗試的方式來學習如何執行所給予的任務。 項目二:虛擬環境遷移至現實機器手臂之學習理論 (已完成) 目前我們已經將現實機器人應用在泡茶以及寫書法的任務上,在泡茶的任務中,機器人可以透過多次的練習,從完全未理解物理系統的情況之中,亦能夠透過嘗試來得到泡茶與桌面上許多物體的概念以及操作順序。 項目三:機器人自主學習之系統框架設計 (已完成) 由於目前絕大多數機器人是按照設定好的規則去完成任務,但為了提升機器人的適應能力,我們期望機器人要有能力去自主學習,目前我們已建立機器人之認知行為金字塔架構,讓神經網路去調整每一層之中的行為,使機器人能夠自主修正行為。 項目四:基於心理學之認知系統 DCNN 架構設計 (已完成) 我們使用由類神經網路所建立的認知模型進行實作,此模型包含假設生成網路、記憶網路、記憶調整系統以及增強式學習。假設生成的神經網路與事件記憶的神經網路進行搭配,使認知模型可以經由過去經驗的記憶去修改生成出來的假設。 項目五:機器人動作事件之記憶系統設計 (已完成) 類神經網路大多運用於監督式學習,並以大量數據進行訓練,然而若是要應用在線上學習的時候,則並不只是進行一般的訓練,我們使用 LTM 模型以及 STM 模型進行類神經網路的記憶固化,因此能夠使類神經網路隨著時間累積漸漸增加經驗,達成真正的學習。 |
成果影片 |
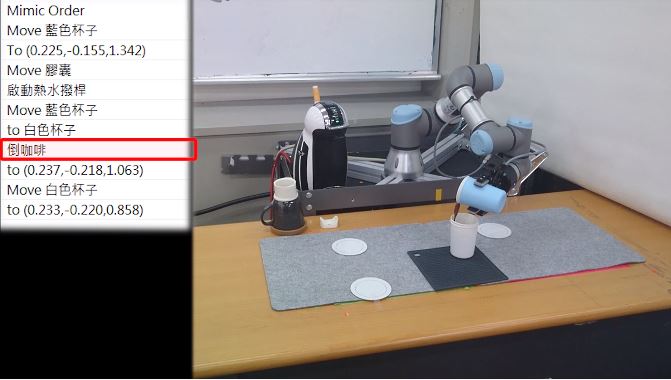
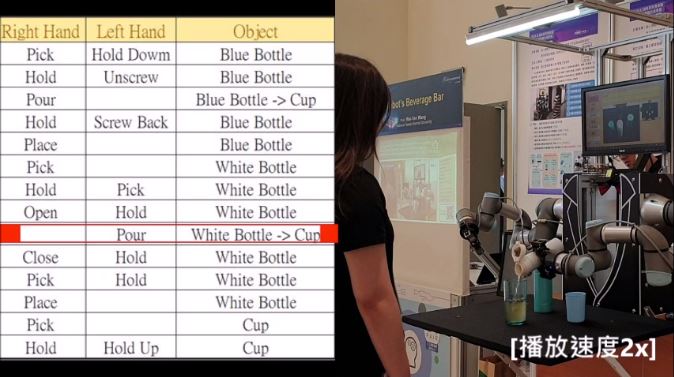
AGI 機器人的初步執行進展
![]()
Step 1: 建立基本能力
|
Step 2: 理解人類的行為
|
Step 3: 學習人類行為
|
Step 4: 機器人知道行為之意義
|
 |
 |
 |
 |
|
|
|||
電話: (02)7749-3539, 傳真: (02)2351-5092, E-mail: andychien265@gmail.com
校址: 臺北市和平東路一段129-1號, 國立臺灣師範大學(圖書館校區) 科技與工程學院大樓4樓TA410研究室
Copyright © Computational Intelligence and Robotics Lab at NTNU. All rights reserved.
校址: 臺北市和平東路一段129-1號, 國立臺灣師範大學(圖書館校區) 科技與工程學院大樓4樓TA410研究室
Copyright © Computational Intelligence and Robotics Lab at NTNU. All rights reserved.